iQOO预告新旗舰:Z9 Turbo搭载骁龙8s Gen3即将亮相
2024-04-03

(据Engadget报道)我们都能想到,当您想要研究水母或章鱼时,其实是很难在他们不受任何损坏的情况下抓到这些超软海洋生物的。值得庆幸的是,哈佛大学Wyss研究所的研究人员提供了一个解决方案。他们发明了一个机器人手臂(RAD sampler),它的花瓣状手指可以迅速在海洋生物周围形成一个球状,在捕获它们时不会造成任何伤害。它的工作方法比看起来更简单 - 它只使用一个马达就能驱动整个连接结构,因此它易于控制,如果出现故障,也很容易修复。
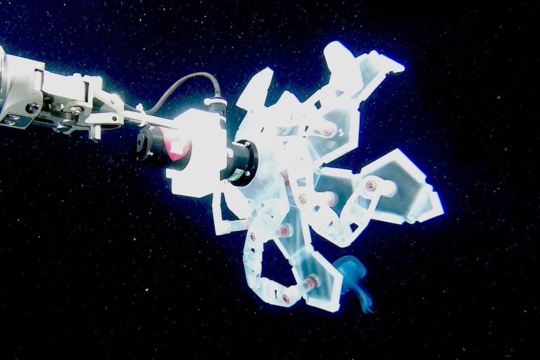
迄今为止,该臂仅用于捕获和释放实验。未来,生物学家将在这台机器上安装摄像头和传感器以收集物质成分、大小、基因排序等信息。如果上述能够实现,研究人员可以在他们的本土栖息地研究脆弱的海底生物,并收集无法在水上或死标本上获得的相关信息。
(编译:周双)
评论 {{userinfo.comments}}
{{child.content}}

 {{money}}元
{{money}}元


{{question.question}}
提交